製品・技術情報
KVASER CANプロトコルとは?(CANプロトコルチュートリアル)
- 2022.02.22

PART 2:CANメッセージ, Part 1
CANメッセージ
CAN busは、同報タイプのバスです。これは、すべてのノードがすべての送信を"hear"することを意味します。特定のノードだけにメッセージを送信する方法はありません。すべてのノードは、常にすべてのトラフィックをピックアップします。ただし、CAN ハードウェアはローカルフィルタリングを提供するため各ノードは、対象メッセージに対してのみ反応できます。
CANは、最大ユーティリティ負荷が94ビットのショートメッセージを使用します。メッセージには明示的なアドレスがありません。
代わりにメッセージは、内容アドレス指定されていると言うことができます。つまり、メッセージの内容によって暗黙的にアドレスが決定されます。
メッセージのタイプ
CAN busには、次の4つの異なるメッセージタイプ(または"frames")があります:
1. データフレーム
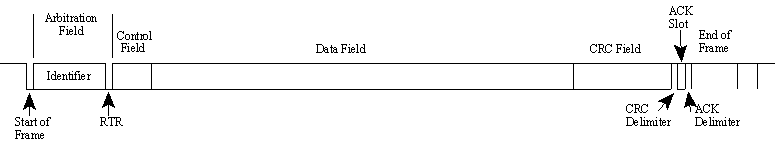
データフレームは、最も一般的なメッセージタイプです。以下の主要な部分から構成されています(簡潔さのため、いくつかの詳細は省略しています)。
- 調停フィールド(Arbitration Field)は、2つ以上のノードがバスをめぐって競合している場合のメッセージの優先度を決定します。調停フィールドには以下が含まれます:
- CAN 2.0Aの場合、11ビットの識別子と1ビットのRTRビット。これはデータフレームで"ドミナント"です。
- CAN 2.0Bの場合、29ビット識別子(これはSRRとIDEの2つの"レセッシブ"ビットが含まれています)。
- データフィールドには、0~8バイトのデータが含まれています。
- CRCフィールドには、メッセージのほとんどの部分で計算された15ビットチェックサムを含んでいます。このチェックサムは、エラー検出に使用されます。
- Acknowledgementスロット:メッセージを正しく受信できたCANコントローラは、各メッセージの最後にAcknowledgementビットを送信します。トランスミッタは、Acknowledgementビットの有無をチェックし、Acknowledgementが検出されなかった場合は、メッセージを再送信します。
- (注1)バス上にアクノレッジビットが存在しても、意図した宛先のいずれかがメッセージを受信したことを意味しないことは、注目に値します。私たちが知っているのは、バス上の1つまたは複数のノードがそれを正しく受信したということだけです。
- (注2)調停フィールドの識別子は、その名前にもかかわらず、必ずしもメッセージの内容を識別していません。
2. リモートフレーム
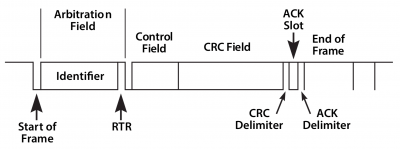
リモートフレームは、データフレームと同じですが、2つの重要な違いがあります:
- リモートフレームとして明示的にマークされ(調停フィールドのRTRビットは、レセッシブです
- データフィールドはありません
リモートフレームの意図された目的は、対応するデータフレームの送信を要求することです。例えば、ノードAが調停フィールドで234に設定されたリモートフレームを送信する場合、ノードBは、適切に初期化されていれば、調停フィールドも234に設定されたデータフレームで応答する可能性があります。
リモートフレームは、request-responseタイプのバストラフィックマネージメントを実装するために使用することができます。しかし、実際には、リモートフレームはほとんど使用されていません。また、CAN規格では、ここで概説されている動作は規定されていません。ほとんどのCANコントローラは、リモートフレームに自動的に応答するようにプログラムするか、ローカルCPUに通知するようにプログラムすることができます。
リモートフレームには1つの問題があります:データ長コードは、期待される応答メッセージの長さに設定する必要があります。そうしないと、調停は機能しません。
リモートフレームに応答するノードは、識別子が認識されるとすぐに送信を開始し、これにより空のリモートフレームを"filling up"と主張されることがあります。これは、そうではありません。
3. エラーフレーム
簡単に言えば、エラーフレームは、CANメッセージのフレームルールに違反する特別なメッセージです。ノードがフォルトを検出したときに送信され、他のすべてのノードにフォルトを検出させます。その後、トランスミッタは、自動的にメッセージの再送信を試みます。エラーカウンタの精巧なスキームがありノードがエラーフレームを繰り返し送信することでバス・トラフィックを破壊できないことを保証します。
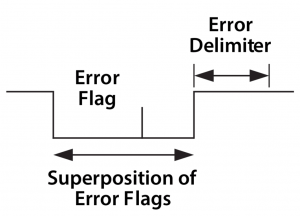
エラーフレームは、同じ値の6ビットのエラーフラグ(従って、bit-stuffingルールに違反します)と8ビットのレセシブビットであるエラーデリミタ(Error Delimiter)から構成されます。エラーデリミタは、バス上の他のノードが最初のエラーフラグを検出したときに、そのエラーフラグを送信できるスペースを提供します。
4. オーバーロードフレーム
ここでは、完全を期すためにオーバーロードフレームについて説明します。フォーマットに関してはエラーフレームと非常によく似ており、ビジー状態になりすぎたノードによって送信されます。今日のCANコントローラは、それを使用しないほど賢いので、オーバーロードフレームはあまり使用されません。実際、オーバーロードフレームを生成する唯一のコントローラは、現在、廃止されている82526です。
標準 vs. 拡張CAN
もともと、CAN規格は、調停フィールドでの識別子の長さを11(11)ビットに定義しました。その後、カストマの要求により規格の拡張が余儀なくされました。新しいフォーマットは、拡張CAN(Extended CAN)と呼ばれることが多く、識別子で少なくとも29ビットを許可します。2つのフレームタイプを区別するためにコントロールフィールドの予約ビットが使用されました。
規格は、正式に次のように呼ばれています:
- 2.0A、11ビット識別子のみ、
- 2.0B、フル29ビット識別子による拡張バージョン(または11ビット、それらを混在可能)。2.0Bノードは、
- "2.0B active"つまり拡張フレームを送受信できる、または
- "2.0B passive"つまり受信した拡張フレームを黙って破棄(ただ、以下を参照)
- 1.xは、オリジナルの仕様とその改訂版を参照します。
今日の新しいCANコントローラは、通常2.0Bタイプです。1.xまたは2.0Aタイプのコントローラは、29の調停ビットによるメッセージを受信すると非常に動揺します。2.0B passive typeコントローラは、それらのメッセージを許容し、それらが正しい場合は、それらをacknowledgeしてから破棄しますが2.0B activeタイプコントローラは、それらを送信することも受信することができます。
2.0Bおよび2.0A(および1.x)を実装するコントローラは、互換性があり、2.0Bを実装するコントローラが拡張フレームの送信を控えている限り、同じバスで使用できます!
拡張CANメッセージのオーバーヘッドが大きいため標準CANが拡張CANよりも"優れている"という主張があります。これは必ずしも真実ではありません。データの送信に調停フィールドを使用する場合、拡張CANは、実際には標準CANよりも低いオーバーヘッドである可能性があります。