産業用エッジコネクティビティ

シリアル - イーサネット通信の最適化で実現する次世代スマート交通インフラ
産業オートメーションの分野では、RS-232/422/485といったシリアルインターフェースを使用したシリアル通信が、何十年にもわたり信頼性の高いコネクティビティとして認識されてきました。しかし、現在、通信の中心がイーサネットを使用することが標準となっている状況の中でも、相変わらず、市場の中で多くのレガシーのシリアルデバイスを使ったシリアル通信が継続的に使用され続けています。今回、取り上げる交通システムは、高度なテクノロジーの採用により、広大な地域にまたがるリアルタイム遠隔監視が現実のものとなり、スマート交通の時代を告げています。しかし、ここでも道路や鉄道沿線あるいは駅に設置されているデバイスから管制センターへ接続された遠隔監視アプリケーションでは、多くの旧式のシリアルデバイスが依然として使用されています。ここで、シリアルコネクティビティによる従来の交通システムを現代のデジタルシステムへと近代化するために、レガシーのシリアルテクノロジーをすべて廃棄し、すべてをデジタルトランスフォーメーション化するために大きな投資を行うことがはたして正解でしょうか。もし、レガシーシステムを現代のデジタルオペレーションと統合して継続的に運用できれば、少ない投資で費用対効果に優れた新しい交通システムを構築することができるという画期的な成果が得られます。
この課題を解決するために費用対効果に優れたテクノロジーとして登場したのがシリアルをイーサネットに変換するSerial-to-Ethernetソリューションです。これによりあえて、大規模な投資をせず近代化したシステムとの統合が可能となり、大規模な交通システムアプリケーションにおける長距離通信や複雑な通信要件などの課題も克服することができます。Serial-to-Ethernetソリューションを提供するMoxaのNPortシリアルデバイスサーバーは、TCP/IPネットワーク上でシリアルデータを簡単に送受信できるように、さまざまなオペレーションモードをサポートしています。この記事では、さまざまなアプリケーションシナリオにおける通信の課題と、MoxaのNPortシリアルデバイスサーバーに搭載されているTCP/UDPオペレーションモードを使用して、スマート交通アプリケーションのSerial-to-Ethernet通信を最適化する方法について解説します。
シナリオ 1:道路交通監視
道路沿線に設置されたさまざまなコントローラーやセンサーが、交通状況や環境条件に関するデータを収集します。これらのフィールドデバイスは、互いに離れた場所に配置されており、交通制御センターと通信し、オペレーターにリアルタイムの道路状況を提供しなければなりません。それに応じて、オペレーターは、交通渋滞、悪天候、事故などに関する情報を即時に道路利用者に提供します。このような大規模なアプリケーションでフィールドデータを収集し、道路利用者にとって有用な情報に変換するには、オペレーターは異なるアプリケーションプログラムからの複数のシリアルデータリクエストへの対応や、事故発生時の長い応答時間といった困難に遭遇する可能性があります。
NPortは、どのように機能するのでしょうか
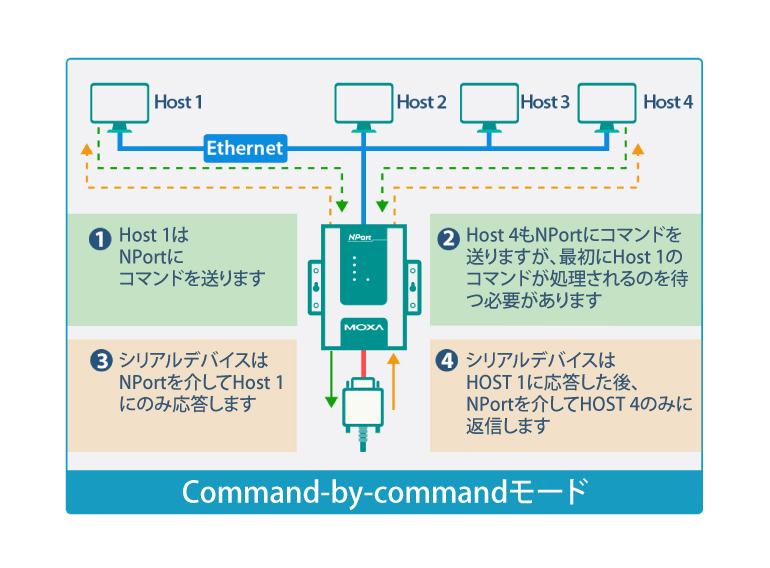
- Command-by-command(1つ1つの命令を順番に実行)機能で伝送精度を向上させる
MoxaのNPortシリアルデバイスサーバーは、TCP serverモードをサポートし、交通信号機、道路センサーなどのフィールドセンサーと接続するリモート監視アプリケーションで多く使用されています。TCPクライアントプログラムを実行しているコントロールセンターの中央システムは、NPortと接続し、コネクションを確立し、フィールドデバイスからシリアルデータを受信します。複数のホストが同時にNPortに接続する場合、MoxaのTCP serverモードは、複数のホストが同じフィールドデバイスから同時にシリアルデータを収集することを可能にするMax. Connection機能をサポートしています。この機能は、複数のコマンド要求を可能にしますが、データの衝突を引き起こす可能性があります。そのため、Max. Connection機能を有効にしたときにシリアルデータの衝突を防ぐために、Command-by-command(1つ1つの命令を順番に実行)機能を使用します。このCommand-by-command機能によりNPortは、イーサネット上のいずれかのHostからコマンドを受信すると、そのコマンドをバッファに保存します。これらのコマンドは、先入れ先出し(FIFO)方式でシリアルポートに送ります。フィールドデバイスが応答するとNPortは、その応答をバッファに保存し、コマンドの発信元へ応答を送ります。
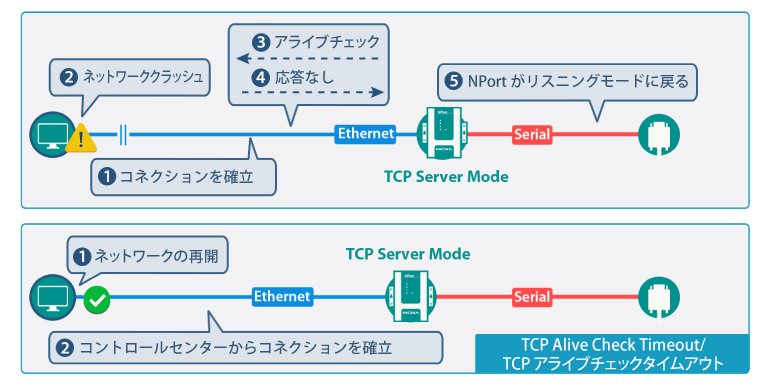
- TCP Alive Check Timeout/TCPアライブチェックタイムアウト機能でネットワーク再接続時間を短縮
ホストがTCPコネクションを確立するために能動的に機能している場合(NPortは、クライアントが接続するのを待つ受動的なTCP serverとして動作している場合)、NPortとしては、ネットワークがクラッシュしたかどうかを判断する方法がなく、コネクションがまだ存在するかのように動作し続けます。ネットワークコネクションが再開しても、リソースが占有されているため、クライアントは、デバイスとのコネクションを再確立することができません。その結果、エンジニアをフィールドに派遣してNPortを再起動させ、リソースを解放する必要があります。これは、人件費と時間のコストの両面で極めて非効率的です。この問題に対処するために、TCP serverモードには、ネットワークが切断された場合にNPortにフェイルセーフメカニズムを提供するTCP Alive Check Timeout/TCPアライブチェックタイムアウト機能が搭載されています。この機能は、TCP/IPコネクションステータスを定期的にチェックすることでイーサネットコネクションのステータスを提供します。
シナリオ 2:アクセスコントロールシステム
パーキングシステムや駅の改札ゲートなどの多くのインテリジェントシステムは、アクセスコントロールシステムを使用しています。これらのシステムは、通常、カードリーダーを介してシリアルデータを迅速に収集し、それをTCP/IP経由で複数のシステムに転送して認証と支払い計算を行います。コネクションの失敗は、時間とコストの損失につながります。コネクションの信頼性を高めるためには、Serial-to-EthernetソリューションがTCP/IPネットワークを通じて正確なシリアルデータを伝送でき、バックアップシステムに十分な通信帯域幅を提供できることを確認する必要があります。
NPortは、どのように機能するのでしょうか
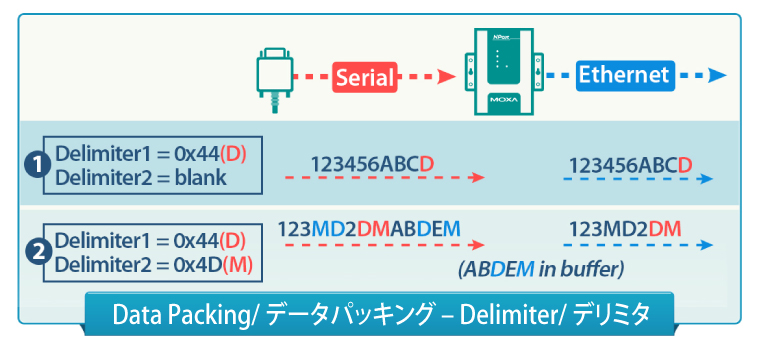
- データパッキング機能を使い要求されたシリアルデータを配信
NPortシリアルデバイスサーバーは、TCP Clientモードをサポートしており、入退室管理システムでシリアルカードリーダーやその他のデバイスと接続する際によく使用されます。このシナリオでは、データはさらなる処理のためにホストアプリケーションプログラムに送り返されます。TCP/IPネットワーク上でシリアルデータを配信する際に問題となることは、データが別々のイーサネットパケットに分割され、アプリケーションプログラムが失敗してしまうことです。NPortのシリアルデバイスサーバーは、シリアルデータが完全で認識可能なパケットで到着することを保証するようにデータパッキング機能を提供します。アプリケーションプログラムは、特定の文字をデータストリームの終了として認識するため、NPortのデータパッキング機能の1つであるDelimiter/デリミタ機能(データを項目ごとに区切り、マシンや人間が読み取りやすく、処理しやすくする機能)により、NPortがシリアルポートで特定の文字を受信すると、バッファ内のすべてのデータをパックしてイーサネットに送ることができます。これにより、決済システムは、要求に応じてシリアルデータを受信することができます。
- コネクションコントロール機能を使用してコネクション効率の向上
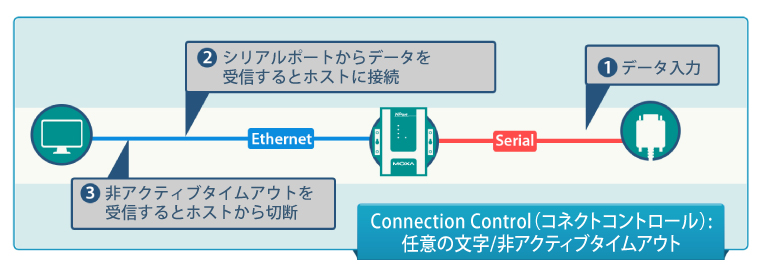
NPortがTCP Clientモードに設定されている場合、Connection Control(コネクションコントロール)機能を有効にすることで、ホストとのTCPコネクションを確立または切断のタイミングを決定することができます。この機能により、TCPコネクションの数を必要なものに限定し、使用していないコネクションを自動的に切断することで、ホストサーバーの効率を向上させることができます。TCPコネクションを確立または切断には、多くの異なるイベントを定義できます。一般的なものとしては、Any Character/Innactivity Timeout/任意の文字/非アクティブタイムアウトがあります。ここでは、シリアルデータアクティビティが発生するたびに、NPortは、ホストとのTCPコネクションを確立するようにトリガーされます。シリアル側が指定された時間アイドルである場合、NPortは、シリアルデータアクティビティが再開されるまでTCPコネクションを切断します。このような場合、Max. Connection機能を使用すれば、伝送通信帯域を占有することなく、シリアルデータ収集用のバックアップホストを接続することができます。
シナリオ 3:パッセンジャインフォメーションシステム/乗客情報システム(PIS)
スマート交通では、パッセンジャインフォメーションシステム/乗客情報システムを用いて通勤者にリアルタイムの交通情報を提供します。駅の列車時刻表や高速道路の交通状況などの情報を表示するために、一連のLEDディスプレイに同じメッセージをブロードキャスト(またはマルチキャスト)します。このアプリケーションでは、通勤者が通勤ルートをこれらの情報に基づき臨機応変に調整できるためのリアルタイムによる高速なメッセージ情報を迅速に伝送するための最適な通信手段を提供する必要があります。
NPortは、どのように機能するのでしょうか
- UDPモードを使用して伝送スピードを向上
リアルタイムのデータ伝送が必要なアプリケーションにおいて、ソケットプログラムがUDPプロトコルを使用している場合、NPortをUDPモードに設定することができます。UDPモードとTCP server/clientモードの主な違いは、UDPモードではデータを送る前にコネクションを確立する必要がありません。TCP通信においては、クライアントとサーバー間で接続を確立する際に3回のパケット交換の手順を使用します。この手順は、TCP Three-Way Handshake(スリーウェイハンドシェイク)と言われ、両者が通信可能であることを確認し、初期シーケンス番号を交換することで、信頼性の高いデータ伝送を可能にします。しかし、UDPモードでは、このTCP Three-Way Handshakeのような手順の必要がないため、TCP server/clientモードよりも高速にデータを伝送できます。このことによりUDPモードは、リアルタイムの伝送が要求され、かつデータ損失の可能性を許容できるアプリケーションに適しています。UDPモードでは、すべてのシリアルポートにマルチキャストIPアドレスを設定でき、同じマルチキャストIPアドレスにサブスクライブしているすべてのデバイスが、そのIPアドレスに割り当てられたメッセージを受信します。マルチキャストの利点は、複数の宛先にメッセージを効率的に伝送できるだけでなく、同じデータを異なる宛先に複数回転送しないため、貴重な帯域幅を削減することができます。
MoxaのNPortシリアルデバイスサーバーは、産業用アプリケーションの要求を満たすために異なるオペレーションモードのためのさまざまな機能を提供します。その他の機能の詳細については、カタログ「NPortオペレーションモードガイダンス」をご参照下さい。
カタログ:NPortオペレーションモードガイダンス
将来のシリアル接続エコシステムを形成する3つのヒントについては、技術情報「業界をリードするMoxaのシリアル接続ソリューション」をご参照下さい。

Moxa
シリーズ IKS-G6824A-20GSFP-4GTXSFP-HV-HV-T

Moxa
シリーズ IKS-G6824A-20GSFP-4GTXSFP-HV-HV

Moxa
シリーズ IKS-G6824A-4GTXSFP-HV-HV

Moxa
シリーズ IKS-G6824A-8GSFP-4GTXSFP-HV-HV-T

Moxa
シリーズ IKS-G6824A-8GSFP-4GTXSFP-HV-HV

Moxa
シリーズ IKS-G6824A-4GTXSFP-HV-HV-T