製造業 / 産業用ネットワークソリューション

効率性だけに固執せず、システムの信頼性を最大限に高める優れた機能を備えたEtherCATネットワークを構築する
よりスマートで自動化された産業オペレーションの実現を目指す競争において、1マイクロ秒単位の精度は極めて重要です。ロボット、パッケージング、半導体などの産業で、より高い精度、スピード、同期に対する需要の高まりに応え、EtherCAT (Ethernet for Control Automation Technology) はハイパフォーマンスなモーションコントロールの標準規格となりました。EtherCAT通信では、マスターから送信されたパケットがスレーブを通過する際にリアルタイムで処理する、その独自の “オンザフライ” 処理という原則が、従来の産業用イーサネットプロトコルでは実現できない、確定的で高速な通信を提供します。
おそらく、このことは既にご存知でしょう。これらの利点こそが、これまで重要なアプリケーションにEtherCATを使用してきた理由です。しかし、産業システムが複雑化するにつれて、最も一般的なネットワークトポロジーに潜む脆弱性が、オペレーションを脅かす可能性があります。
EtherCATネットワークのデイジーチェーントポロジー構成の弱点
多くのEtherCATネットワークは、シンプルさとコスト効率のためにデイジーチェーントポロジーが標準的な接続方法となっています。デイジーチェーン接続とは、下図のようにマスター (PCなど) を1台目のスレーブデバイスから2台目、2台目から3台目へと数珠つなぎに接続していく方法です。
これは、一連の延長コードが接続されたようなものと考えることができます。主電源に接続されている1本の延長コードの大元のコンセントを抜くと、それに接続されている機器電源などのすべてが遮断されてしまいます。産業環境では、さまざまな事態が発生する可能性があります。チェーン内のノードの故障やケーブルの損傷、またはチェーンのどこかで接続が失われたりします。そうなると、チェーン内のダウンストリームにあるすべてのデバイスが即座にマスターへの接続を失います。チェーンにつなげるデバイスが増えるほど、このような事態が発生するリスクは高まります。これにより、生産ライン全体が混乱し、生産性の低下を招き、高額コストのかかるダウンタイムの発生、そして複雑なトラブルシューティングを引き起こす可能性があります。デイジーチェーントポロジー設計には、このようにシンプルさとコスト効率性の利点がある一方で、重大な単一障害点 (SPOF) が存在します。

脆弱なチェーンからレジリエンスに優れたネットワークアーキテクチャへ
それでは、最も単純で脆弱なトポロジーに縛られることなく、EtherCATテクノロジーを最大限に活用するにはどうすればよいでしょうか? その答えは、異なるトポロジーを使用して、レジリエントに優れたネットワーク構造を構築することです。EtherCATは、ツリー型やスター型など、複数のトポロジーをサポートします。これらのトポロジーが、より堅牢なEtherCATネットワーク構築にどのような機能を提供できるかを見ていきましょう。
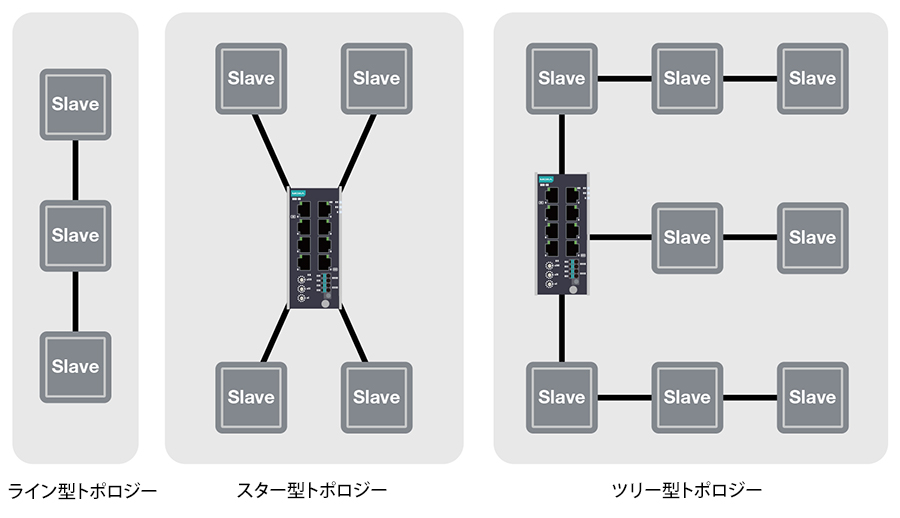
単一のライン型トポロジーと異なり、ツリー型トポロジーではEtherCATジャンクションを分岐点として使用します。マスターはジャンクションに接続し、そこから複数の分岐ポートを提供します。これらのポートは、それぞれ個々のスレーブデバイスに接続することも、より小さなデイジーチェーン接続されたデバイスによって1つのセグメントを形成することもできます。これにより、マスターを根幹 (root)、ジャンクションを主要な枝 (limbs)、デバイスセグメントを小枝 (branches) とするツリー状の構造が形成されます。対照的に、スター型トポロジーはツリー型トポロジーのシンプルバージョンであり、分岐レベルが1つだけのツリー構造です。1つのブランチでデバイスまたはケーブルに障害が発生しても、他のブランチには影響を受けず、稼働を継続できるので、ネットワーク全体のダウンタイムを最小限に抑え、重要なオペレーションの継続性を確保できます。この柔軟なトポロジー設計は、すぐに得られる3つの利点を提供します:
- 障害分離:障害が単一のセグメント内に限定されることで、トポロジー全体にわたる壊滅的なシャットダウンを防止することができます。
- トラブルシューティングの簡素化:メンテナンス担当者は、障害が発生した正確なセグメントを迅速に特定できるため、平均修復時間 (MTTR) を大幅に短縮できます。
- 柔軟な拡張性:新しいデバイスや機械モジュール全体を追加しても、既存のネットワークを中断することなくトポロジーをさらに分岐させることができます。
産業界の課題
半導体製造とリチウムイオン電池製造という2つの事例を見てみましょう。どちらも、リアルタイムなモーション制御と精巧な生産を実現するためにEtherCATを採用しています。このようなセンシティブなアプリケーションでは、システムのダウンタイムは一切許されず、シームレスなEtherCAT通信を維持するための信頼性の高いコネクションが求められます。
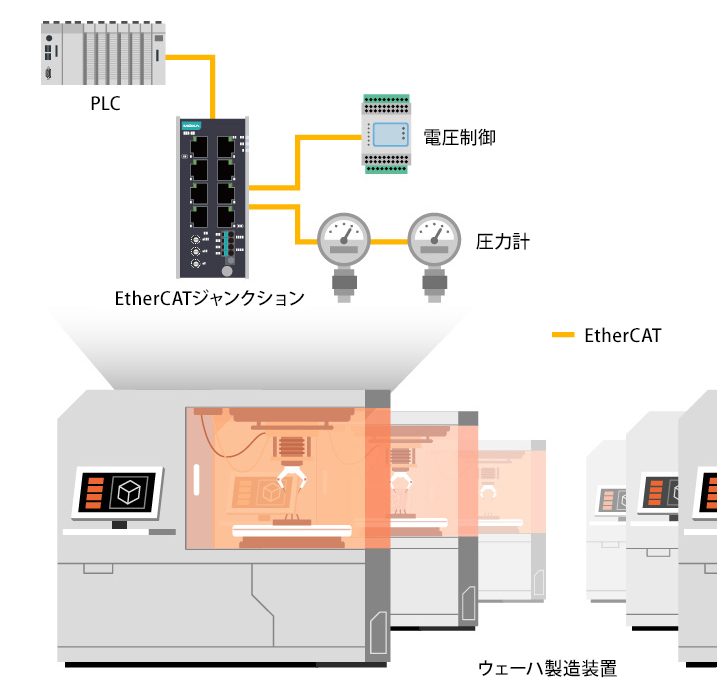
半導体製造装置
半導体製造において、EtherCATプロトコルは主流なテクノロジーとなりつつあります。PECVD (プラズマCVD:Plasma Enhanced Chemical Vapor Deposition) 装置を例にとると、スペースが制限され、ノイズの多い環境下で新しくデバイスを追加する場合、時に大きな課題が生じます。装置には、複数のセンサー、圧力計、電力制御装置などを接続する必要があります。そのため、装置製造会社は、将来の拡張性を考慮しつつ、ノイズ干渉に強く、複数のポートを備えたコンパクトなEtherCAT製品を導入する必要があります。
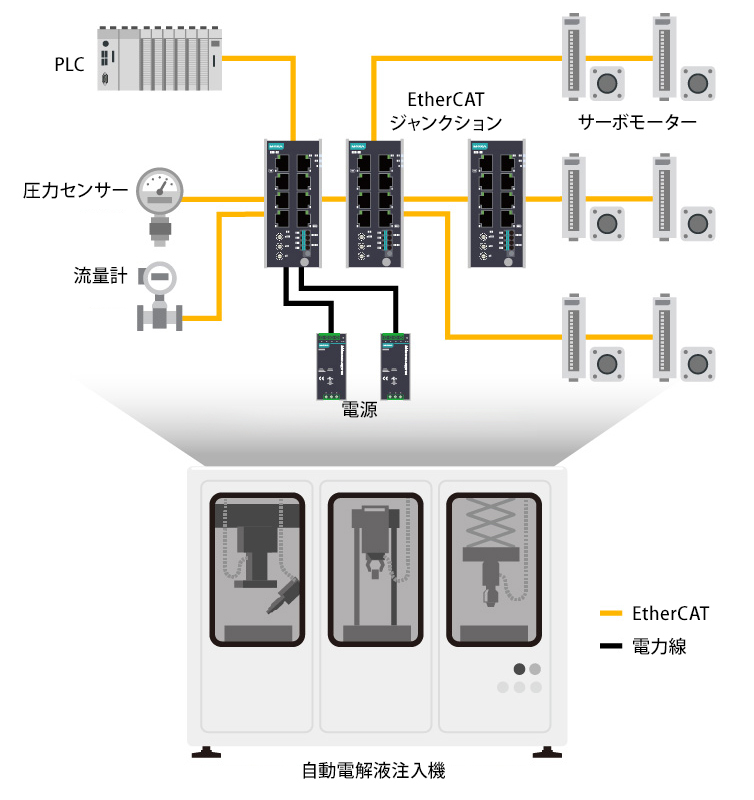
リチウムイオン電池製造
リチウムイオン電池の製造装置では、数百におよぶEtherCATスレーブデバイスを複数のネットワークセグメントに分割することが珍しくありません。同時に、製造会社は、停電やシステムの不安定な状況下においても正常なオペレーションの維持を保証する必要があります。製造会社は異なるベンダーのEtherCATデバイスを使用することが多いため、相互運用性も重要な課題となります。したがって、異なる製造会社のEtherCATデバイスとの互換性がテストされたEtherCATデバイスを評価して選定することが重要です。これにより、既存のトポロジーにこれらのデバイスを導入する際のスムーズな統合が保証されます。
信頼性を追求した設計
堅牢で柔軟なトポロジーを実現するには、産業用エッジ向けに特別に設計されたハードウェアが必要です。Moxaの産業用EtherCATジャンクション:EJSシリーズは、ハイパフォーマンスネットワークの中核となるように設計されています。堅牢でコンパクトなEJSシリーズは、最新のオートメーションニーズに応え、最大限の稼働時間と運用のレジリエンスを実現する、レジリエントと適応性に優れたEtherCATネットワークアーキテクチャを構築するために必要な柔軟性を提供します。
EtherCATネットワーク強化の準備を整える
EtherCATデイジーチェーントポロジーを使用する場合、固有のリスクを軽減させる方法を理解することが、運用効率の向上に向けた次の重要なステップとなります。最新のテクニカルノートでは、潜在的な障害ポイントを特定し、EtherCATジャンクションを使用して、より堅牢なネットワークアーキテクチャを導入する方法を解説しています。
詳細については、こちらのテクニカルノートをご覧ください。
テクニカルノート:フォールトトレラント - 耐障害性に優れたEtherCATネットワークの構築 - システムの一部に障害が発生しても、全体としては機能を維持し続ける
MoxaのEtherCATジャンクションの詳細については、下記ページをご覧ください。
特集ページ:EtherCATネットワーク、もっと自由に。ジャンクションボックス「EJSシリーズ」登場!
製品ページ:EJS-04シリーズ / EJS-08シリーズ